1. Định nghĩa và tính chất của vectơ pháp tuyến của mặt phẳng
- CẤU TRÚC Because – Cấu trúc, cách dùng Because, Because of
- Văn mẫu lớp 8: Thuyết minh về cây bút bi 2 Dàn ý & 33 bài Thuyết minh về chiếc bút bi lớp 8
- Văn mẫu lớp 9: Thuyết minh về tác giả Nguyễn Du và tác phẩm Truyện Kiều 2 Dàn ý & 11 bài văn mẫu lớp 9 hay nhất
- ĐẠI TỪ QUAN HỆ (RELATIVE PRONOUNS): CÁCH DÙNG VÀ BÀI TẬP CÓ ĐÁP ÁN
- Nghị luận xã hội về kỹ năng giao tiếp | Dàn ý và văn mẫu chọn lọc
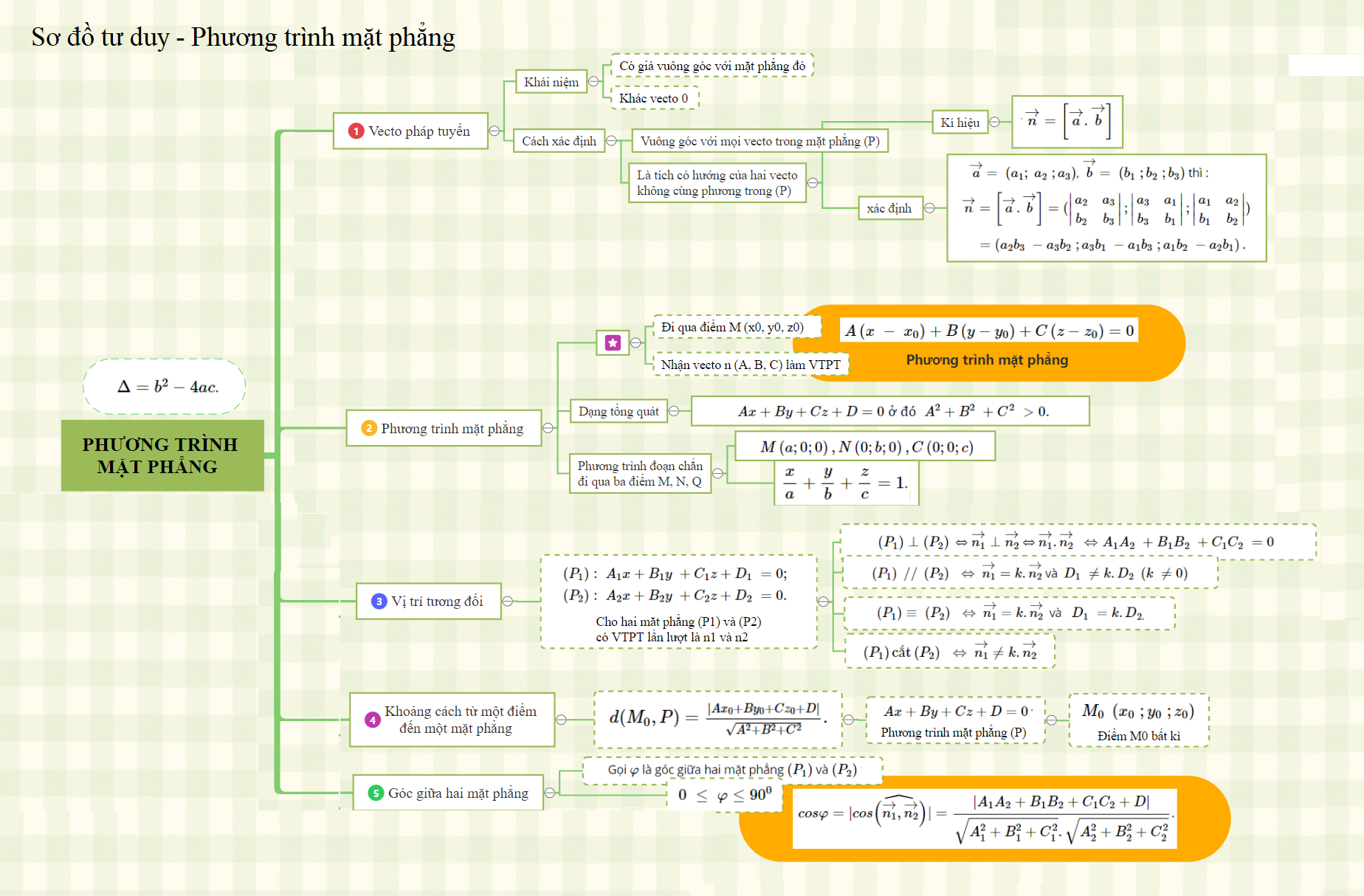
* Đối với một mặt phẳng ((P)), vectơ (overrightarrow{n} ≠ overrightarrow{0}) mà vuông góc với mặt phẳng ((P)) được gọi là vectơ pháp tuyến của mặt phẳng.
Bạn đang xem: Lý thuyết phương trình mặt phẳng
* Đối với một mặt phẳng ((P)), cặp vectơ (overrightarrow{a} ≠ overrightarrow{0}), (overrightarrow{b} ≠ overrightarrow{0}) mà không cùng phương và nằm trong mặt phẳng ((P)) được gọi là cặp vectơ chỉ phương của mặt phẳng ((P)). Khi đó, vectơ (overrightarrow{n} = [overrightarrow{a}.overrightarrow{b}]) là vectơ pháp tuyến của mặt phẳng ((P)).
* Nếu (overrightarrow{a}) ( = (a_1, a_2, a_3)) và (overrightarrow{b}) ( = (b_1, b_2, b_3)) thì:
(overrightarrow{n} = [overrightarrow{a}.overrightarrow{b}] = (|2b_3 – 3a_3|, |3a_3 – b_2|, |a_2 – 2b_1|))
( = (2b_3 – 3a_3, 3a_3 – b_2, a_2 – 2b_1))
* Một mặt phẳng được xác định hoàn toàn bởi một điểm và một vectơ pháp tuyến của nó, hoặc một điểm thuộc mặt phẳng và một cặp vectơ chỉ phương của nó.
2. Phương trình mặt phẳng
* Mặt phẳng ((P)) đi qua điểm (M_0 = (x_0, y_0, z_0)) và có vectơ pháp tuyến (A, B, C) có phương trình dạng: (A(x – x_0) + B(y – y_0) + C(z – z_0) = 0)
* Mọi mặt phẳng trong không gian có phương trình tổng quát dạng:
Xem thêm : Biến đổi đơn giản biểu thức chứa căn bậc hai – Cùng Toppy chia sẻ
(Ax + By + Cz + D = 0, với A^2 + B^2 + C^2 > 0).
Trong đó, vectơ (n(A, B, C)) là vectơ pháp tuyến của mặt phẳng.
* Mặt phẳng đi qua ba điểm (M(a, 0, 0), N(0, b, 0), C(0, 0, c)) với (abc ≠ 0) có phương trình: (x/a + y/b + z/c = 1). Phương trình này còn được gọi là phương trình mặt phẳng theo đoạn chắn.
3. Vị trí tương đối của hai mặt phẳng
Cho hai mặt phẳng (P_1) và (P_2) có phương trình:
((P_1): A_1x + B_1y + C_1z + D_1 = 0), ((P_2): A_2x + B_2y + C_2z + D_2 = 0)
Đặt (overrightarrow{n_1} = (A_1, B_1, C_1) tương ứng với (P_1)) và (overrightarrow{n_2} = (A_2, B_2, C_2) tương ứng với (P_2)). Khi đó:
((P_1) // (P_2) ⇔ (overrightarrow{n_{1}} trương đồng với overrightarrow{n_{2}}) ⇔ (overrightarrow{n_{1}}.overrightarrow{n_{2}};) ( = 0)
( (P_1) cắt (P_2) ⇔ (overrightarrow{n_{1}} không trương đồng với overrightarrow{n_{2}}) (nghĩa là (overrightarrow{n_{1}}) và (overrightarrow{n_{2}}) không cùng phương).
4. Khoảng cách từ một điểm đến một mặt phẳng
Xem thêm : Phép Quay: Lý Thuyết, Công Thức Và Các Dạng Bài Tập | Toán 11
Trong không gian (Oxyz), cho mặt phẳng ((P)) có phương trình:
(Ax + By + Cz + D = 0) và điểm (M_0 = (x_0, y_0, z_0)). Khoảng cách từ M_0 đến ((P)) được tính bằng công thức:
(d(M_0, P) = frac{}{{sqrt {{A^2 + B^2 + C^2}} }}).
5. Góc giữa hai mặt phẳng
Cho hai mặt phẳng ((P_1)) và ((P_2)) có phương trình:
((P_1): A_1x + B_1y + C_1z + D_1 = 0), ((P_2): A_2x + B_2y + C_2z + D_2 = 0)
Gọi (varphi) là góc giữa hai mặt phẳng ((P_1)) và ((P_2)) thì (0 ≤ varphi ≤ 90°) và:
(cosvarphi =|coswidehat{(overrightarrow{n_{1}},overrightarrow{n_{2}})}|=frac{{|A_{1}A_{2}+B_{1}B_{2}+C_{1}C_{2}+D|}}{{sqrt{A_{1}^{2}+B_{1}^{2}+C_{1}^{2}}sqrt{A_{2}^{2}+B_{2}^{2}+C_{2}^{2}}} ).
Loigiaihay.com
Nguồn: https://toibiet.net
Danh mục: Giáo Dục


![Thuyết minh về món ăn dân tộc Việt Nam [Bài mẫu hay nhất]](data:image/jpeg;base64, /9j/4AAQSkZJRgABAQEAYABgAAD//gA+Q1JFQVRPUjogZ2QtanBlZyB2MS4wICh1c2luZyBJSkcgSlBFRyB2NjIpLCBkZWZhdWx0IHF1YWxpdHkK/9sAQwAIBgYHBgUIBwcHCQkICgwUDQwLCwwZEhMPFB0aHx4dGhwcICQuJyAiLCMcHCg3KSwwMTQ0NB8nOT04MjwuMzQy/9sAQwEJCQkMCwwYDQ0YMiEcITIyMjIyMjIyMjIyMjIyMjIyMjIyMjIyMjIyMjIyMjIyMjIyMjIyMjIyMjIyMjIyMjIy/8AAEQgA8AFAAwEiAAIRAQMRAf/EAB8AAAEFAQEBAQEBAAAAAAAAAAABAgMEBQYHCAkKC//EALUQAAIBAwMCBAMFBQQEAAABfQECAwAEEQUSITFBBhNRYQcicRQygZGhCCNCscEVUtHwJDNicoIJChYXGBkaJSYnKCkqNDU2Nzg5OkNERUZHSElKU1RVVldYWVpjZGVmZ2hpanN0dXZ3eHl6g4SFhoeIiYqSk5SVlpeYmZqio6Slpqeoqaqys7S1tre4ubrCw8TFxsfIycrS09TV1tfY2drh4uPk5ebn6Onq8fLz9PX29/j5+v/EAB8BAAMBAQEBAQEBAQEAAAAAAAABAgMEBQYHCAkKC//EALURAAIBAgQEAwQHBQQEAAECdwABAgMRBAUhMQYSQVEHYXETIjKBCBRCkaGxwQkjM1LwFWJy0QoWJDThJfEXGBkaJicoKSo1Njc4OTpDREVGR0hJSlNUVVZXWFlaY2RlZmdoaWpzdHV2d3h5eoKDhIWGh4iJipKTlJWWl5iZmqKjpKWmp6ipqrKztLW2t7i5usLDxMXGx8jJytLT1NXW19jZ2uLj5OXm5+jp6vLz9PX29/j5+v/aAAwDAQACEQMRAD8A8zx2Hal2n1zUmzk0oWvSsfPcxGMg0mCO9Ssm089aTbRYXMNKMoUtkAjIp/yljtDYI4yaUgnHtShDjPYdaA5hhBBwTzT8NhSemMCgLTwuadiOYZgjuaCD71Jt4pcUWFzEeDjvTmAyNuQMDqe9SLHngDPelCUWDmGBCc4yacEOamQFc4JGRg4p8YCsCV3D0pDuQhaeEz3/ADNSBKdspDuRhaeWJVQe3SnBeeeB60baLBcZj61bhUlQPeodver0CdKTHFlWRD5jfWoSnz9auTL+8NRFPmJFMTZBgg5FMdenWrJTFNdOaBXK5jYKGwQD0NNZVyMA9OcnvVjacYppQ84HSnYm5VZGUkHIpCrYHp2qyU9qYU5qhXK+PrSYIqbZSbaCeYjwfelYKQu3IOOcnvTwhJAAyT2o20WDmIgpJwKPzqUbkOQcHpQowwJGQDQFyEg0oGTjOPqakYAkkDApoGKYcwzHuaXc2wJ/CCTTttKVweOR2PrRYfMR4PrSgHNSBM8ilC8iiwuYrbKXbUuzAz70bakvmIttO8rKAruJAy3HA5qTbmgAgEDv1pi5iLZTgSFKgnB6in4p4i+QsWA4yAe9IXMQqozyOPanBadtJ5qaO3du2BTFzEGynbBxjNXVsx/Exz7VItpHnnJ/GnYnmKASnhK03sony6ZXJPy+lN+wvtLLyBSGmVMFlAwPl9BR5dT+WVOCKUL2pFXIduTinNHtcr1wccVJtwcUu044pWDmIgnajbU6rz2pCuDQHMRBecVegXgVX2fMKvQL8v4UmiosrTL+8/CoynzVamT5/wAKZt+anYTepWK80pj3qMZL8544xUhGTSHKn5TTsTzEGzFIMjODgHg1MV+XPrSrHkZJA4z9aBXK+wfhTCnGauJbyPyF4qUWXGWb8qpITkZbJxTCgwMde9a5s4x61H9iQ8DNFiOYy9lJsrSmtQfucAdqreQ4ydpwvU0xcxXOdgTjAOenNN21Nim7aA5iIpSvEUbHB+hqXbmjb69aA5iELRtqYLn0pNvFA+YjC08LShakC80C5iqF604qMnGcU8LTwtBXMQgYBA79aTZVkxAIGyOe1NK5PQUBch21KI/NlJwFBP4CnpHuPIyKtxoIyDjkUWJ5iKOBVHNS7cU7FLinYnmEAzTwM0uwAKQ2SRyPSnqOKQXHRjBqVfkYMBnByRTFWpU6UmUmMeMNnI4PpVV4NpyKv44xTCuDzQO5SKDqKQL7VbaOmFdmRgHI70rDuV9vNPkTkH1p+znkVP5e6MH2oBMqKpDqfQ5rQiTKk+tQrF8wq/FH+7qWXApTJ84phQdR6Vdkj5FNaHC/hTQNlDaQxxUe3LYq+0IEZbPJOMd6iSLcelMzZWMeWAA6VaWBSQcAcAVKkQU5IzT8E8U0iXIYFx8o6UhA6elTNwCcAE1HtzxTJuRFc9KawCj3q1tAQfMMk8ioGwT7dqaB6FYjFMIzwamYUwimZ3Kk8IZ2cADJ6CoPL9a0Mc1HJGD2osHMVNo4xmkK1MUwacmFJ4ByMc0rD5isU4pNtTlMCm7adg5iML7VIcu5Y4yTninbADTlXkUWDmKwT+dPCgZGM+9SLHuYjOKUpg4pF9LkRUUBMmpSop6p0oFcWFQpUsMgHketOwCT29qeY2Q7WGCKTnAB7dKCWxpWlAp2KdtpiuIBzUqDnmkVcmpAtIpSHbiFKjhTjNIODkUpFLikVzD/AHqTYGQtkYHaolOOKlUYJx933pDTIWXBxSeXkYqwUyPalVPzoEir5fPNWIkzHT2iwamhTORSZcdyuI8MKvwx/ujn1pvk8ir8MP7k/WobNoJmfJGMCmvHwB1q7JFwKZJH3poUkZsidhTki2r71Z8sZ+lKVwtWjFlMrg9M08qMkgYHWpzCU69TzUUmcBB9aZnsQEliaXbgVIE2/WkIAoFcifioWFTkZpjLxTJciDJUMB/FwaiIqwymoiKaIbIgOacE3A5IGBnmjbSkelMVyu8dN21ZK5FMKUBzEG3jFG3HNS7aCtAcxEEzTwvNPUcU8LzQFyrsPXHGakSEuDg5PpUywu64J4GcDNTQ2cituGMis3JI6qdKUpbaFd7ZozyOK09Dk0syta6tDmGT7s6kq0R/DqPr0qJY5WOWHSug8O3umox0/VLWB4JDmKV4wdrdwTjof0rOUtDrhQSqJrT1HX3gOYDztNvEnjcZVX4OP94cH9K5y80bUbDP2qzljUfxYyv5jivVbbTrawAFkrwRk58tXJQ/gcgfhU5lIzn+VYrESjoz0J5VSmrrR/ejxZQSMjpUgXNetSaPpN/IRPaxhm5LL8pP4iq8vgTRpjlXuEyOgYf1FaxxMXujinlFVL3ZXPMI1zjNTBOvtXY6h8PriD59PuBcDOfLYbWH0OcH9KzZvDGs2yjztNmA9Rhv5E4rRVIS2Zwzwtem7SizBKEDpTSOKvvbSqxR0IIOCO4/CoTFnPHTqKsy1RWC5qePPSrdhpN5qUhSzgaUjqRwB9SeK6Kw8E3G/fqU8cEQ6qjbmP49B+tRKcY7s3pYerV+GJzapxThFzjFd5b+GNGTkGaQZxhpMfyxUeq+FIXj83TgUkH/ACzZiQ30J6GsVXjex2yy6tGPMcSIs8VNDDh6uLaursjqVdTggjGDUiwjIrRyOeFN3IvIFXI4v3NOEWRVhI/3NZOR1QgUngzzUEsXy1qbDjHaoJIsjHvTUiZUzK8rauccnmmFOa1Whz2qXT9Fl1GdlX5IwfmkPQf4mr50ldmPsJSfLFGEw9ah8sjLHrXoreGdJjhCvFIx/vmQgn+lZd14UtpmIs7wq4/hlGQfx4qVXibTyysldanFlSTmoSNz47V1F14S1OCLzERJx3ETZI/CsRrRopDFKrI/owwfyrWM4vY4KmHqQdpKxTEZPApTAT2rTis2IGEPTqani0+eYlIoHceiDdj8qbmgp0JSZgPEfu44qIwnPSuxt/DGoXMoH2cwqOS0vy/p1rUh8DWy83N27H0jUKP1zWbrRR1Ry2pPZHnJt2Hb8KasTPII1Us56KBkmvUP+EU0iBSziSQgf8tH4/TFWII7e0Xba26RKfRcZqHiUtkbrJpN6ux59Z+FtUuufs/kof4peP061o3eiaVoFsJL5ze3bLmOH7q59SB2/Guzk3yx7RI8f+0mM/qDWTfW2i6XE1zcWyTXLDK+axdnP454qFXlJ6m8sup0Y3jv3fT5Hm8mZJGchQSckKMAfhUZStO6LT3DysFBdiSFXAH0FQmEDOa7ObQ8B0ndlRU4p6oSRxVlYcDpT0h5o5hexZmx5EnTJFX4pWz9arpGVlJ9KsxyqF+7gjtUTVzrw03Dd2NLTrH+0plt/tcEEruqRrKH+ck4AG1TjnHXHWuhsvDtjcSzWQlt5b60RzOsZkA+Q4PJUDOT/wDXrndFljTXtOlkdUjS6iZmY4AAYZJPpXXaHqmljxJriyLbRvKZ/LuGcbZg0nC8nBzx06iuacWkerh6sZNc1t7ElhYJYptiMyIONhcsv5GtFAznC/NWrbXMaJDNcPulSUrnOWClT17kZNJaAWsUwMiM++MhY2DFgG7VzNnsKKSsjOMckbBjHkA9RzV+1cSoZPM2oOMY5J/w96mjVzLeHzY2WSJ2Tb1weRn0696ngAjkRC+bdVwCXAVuP7uP50AIk0aL8px+FC3aoTl+cEgYPJ9KSF2aOIq+FQAMUlCheepBHX+dMtmK+Y6zBgG+Vd2wH/aI9PapKCVYLxG822jcBdzZUHIxz19KzZU0xCrf2bBvTGHEagjPpxWnA7B5lMuCytjDYG71/wDr1m3UJDHdIHz8xIbPP1qk2Zypwetiu2r7ESJVAb5sHGAcdKqS6gsjIlw8ezGSC4Bq3ZeWr3fIQm3bYScfNkEY98jI+lUfFU9teQXEEU9u86aiqxjzFyqtEu7HPC7s5PTOc1NSXKrm9GmpysTR3NtahF+2WzbgJAVlB257H3q5Fq9ocBrqEevzisTUZFfWvD93JeW8ghS2jncXKOVcMSxODn8envTDqMd5fa/Bd3MT2eyaS2VmAXzFb5Cnucnp97JzmsvaM6Pq63NvWdMjuZpPKZDdwY3qp6gjIB98dK5toecgc9662y1CO58S6kouY5LQ+WBtYbD8nJyOpyMZ68AdhVO+s0acSoMb+v19a6qdTQ8nE4Vc3MjBVEX5XdFPoXANXIFgl2xi5t1J4y8qgD6nNLHPp2qM9lqlykA06cvGz5/eRfxxjGOcgHPJ54HFNt743Zv9RN1su7mUL5MdzHA6RDp+8Yc/dAwMZxk5zWLru52QwEFHW9yRbSO4u/s9lMlwWJ2fMFLYGemfrRdWCQW1rKJdzToXKEYKjsepyDzg+1WV1S1t/FGmSpfj7M9qi3EglLB32sAZDgZI45YDHtWfp9lIkcjy3EM00rbmEcokIJJ+8wyMnr1PvVQqtuxlWwUIwckS2WnNezbSSsa8s1bf2uxsk+zrPDGU42FxkH3p0Ua2dssannGWPqa45J0/4SqK6lZVjF8uWZgAAGHJ9qVWrYvB4WNm+p00uq2rjm5hKjnG8ZNTFbfyGuxaqXKeb5X2j+DGPMx1255zn9Kp3F9p0ljcRfarVlNreoE8xSDtlBhGPYZ2jsM4o+3aUPHv2jfyx4uftK+Uf3WOm38PvdfyqPaHT7BO+/Uu2M9zdxyPbPFI0e0MitkjPTtj171Z+1285aOS2EwJAAcA9utZfhiKFPDE6RELNM3zs0yjcc9AM8DHr1ye2K1hOY7G0WCTa67s4PI57+1WpNq5hUglJxGRW+meYrJZRJnodmeK0I7ncRHHCqrtPfAX3NU7iKL7XIYsbAQflPH+c1NCUS2uAx3Z2/KDgnmndkKMVsiSd0DBH6bRg9c+4NVJLgodu7IPQ+9F3NGbO3CHpuyCckc1FpzgajE5kXYM5LHHY0+gdSCaZnOwAsT7dKYYZVTIUD1xVu3kmks7hbllMsZBiB7c8ge2O3Sqr+cThn49AKAI47aS9lFukm1nzznHbPUVUj8O2FzGLmTTnYjqDcsDPjk4XBJOOuD9K6WGVReROksaWgX5ULAbTg9uxznn9eaoXsmmC502a82F4hHscyABGz9O3ehNrYipGLXvJfM4RtN0/UN8tre21nt3M0FxvXCjGCrfNuznp1479ayru3giupEt5mmhU4WRk2bvfGTj/PStbWmjn1q9kiCbDM5BVshvmPOffrV6G9a08HmO3uRFdfb9wCsBIF8vGR3Hpke47muxSaseJKnGTfT+vU5cJipFTnNbniD7PNdWdzC0TSz2kclyYyOZjndkDgHpkVlhMVSldGUqXK7GeMKelL5KH5scVYMWTSCMikpFzpyi7SRDsUcAUbcOGGMqcirUFtLcyrFBE8sjdERSxPfoKaI+eBTTM+S512lagb6DMbgTKPnjPOPce1aaSzxAMVBxyeorjbmwm02S3EzIs7DeYQTvj9N3oSO2c464rtYLeWXT3dZpI/L2iSGTcHTOMAg/WuWcbao9vD1ZT92W6HxahcuW8+R8Mf7xI/KpWk3cqx5HNRwWasATz6ZOateVCh5YA+mahnSRATOgUMxjHOCeB+FTJhBhvyp/mAx7Y1wB3NMMTBBIR8rn5TnrUFD9xY5/hHQVHJnawHWrAgkWQRbfnH8OaqHc3ygEsxwAKaJZVimhSQhlO7OAe31NcBcz/aL95WIUM7cgdixPP4mu+u7V4RIFHmTKhIWPJO7+77n6VwsukXEWkHUHaMKs/wBnkiO4OjgZwQR/Inr9cY19bHdgrK7ZEYyC4CMxPQr2+tNCOf8Alm+D/smtrQbmCCKV551i37AM9SBnNdFFgiJtxDModeMZU9CM9ves4001e5tUxEoStymP4XjaNrsEHGUwcYz96uoPzQn2qMjcd46fyp1zBcLbMEjJeVD5QyPmJGBz9SK3iuVHBOXtJ3fU87mkElw8qgjeckE55PX9aREZgdqk/QVJLC9vcSQyLtkicoy5BwQcEVt+Hry0s452nnCNIw4I9M/41zRV3ZnpzlyxulcwvKkx/q36+ldL4WjIjuN6lSHBAIx61t291BdKTBOsmOu09KnRS7hRyxOAK6I00ne5wVcQ5rkasQ3DDBZug5NebyMXkJPc5Nej31ncyQSwQorzujKih1znB9+PxrhZ9PntY47m5jV7YvsLwTIwJAB27lyAcev61FY3wdkncpojFSyqzc9hTh5szqWRgqjauE7df612FnBZaTpT3he7iguG/cGeMISO2SCe2T0Ge3FSWrpcqXhmV1U5+VulKNJNblTxTi9FoJ4UaOPS5xOpOZeBjBxgc1sQjc5KjApsVsWEjBcqowTnpmp418s57Vuo2VjhnPnk5dxzL8vHGe9NL8HcfmHenk/MUP1FQyI25eDluOOuaCWVZVYsdvJNVHk8snBwavyKbeXYSrMOoU9D6fWoWENxMA+FJPILbf1PFWiSst0qKCrEsvb1qU3E5AIUYP1qa70qCOMMgYkncCzr93tgAnP1qKO1YxAJIykHHBNICJmuW5O1R3OOn51z2qXP2mYIr70X+L1Pt7Va1dlMixCUybfvHJIz6VSuLKa18rzk2ebGJU5Byp6HitYRS1OLEVHL3FsUSlJsqwVpSoNbXOPlK2zNOCYqTbzUgTJpXDkKQGTQy4HFG3BpyjdUpJanTUm5e61qbPhCbyPEVsrGNUkJBZ1XOdrYAJ5GSccdadYaVdPq8ct9bwxuY2nWB4QDIEGMCJSvJx0OM4J55rHC4PFPCcYPWk+6FCOiTWzOh1G3jt9CivfIQXSXZjzLZxxkKUzhoxkdsjcM85HbM3iH7W2ryXXmyppgMZEkbhFcsowR/fPXkZOPYVzPlHr2oa3kdxtQkAdhSSHOTT2O0hiLxK3nb0IyCG4NbS28cZAhhjaHbwxUc+pJ7fpXn1lO9pMudxTPKbiM11FtdQyx7k3H1BWonGx1Uqyn6mgx8w5A47ZqzAEkj2scCFvMyRnjuKoLIz/e4WnFw3yjgDrWdje5Ytne61AM0e6Mk7gV3AcHH+faoYI2M0uU+aNfuMm5ue4Xj171XxkljjA6VAwH3sjmmK5cvriKxSxuG2JulVZGdFUAeYoJI6AjPXqK4XxTBqQ1G4mug62v2qVbdXIUYzklU44PGWAwT1JJrV8QhFs1RyVEkiqxAzgcn+lcpHB5j4Xj39K56z1sehhI2jzD7eYxqHUKdr5CsAw9eh6/jXU679su7PTrq2jjMENjHI9wiIgVgSCobA7n7gPXtWNBot2bcyxRF0PIPAJ+gzzVNlXjgdKyV0jodpNNPY7DQtT/ALQtmiJBuEALcYBFdPMVZbSGVxGpMTIxxgMDnH44xXnehSrbamkikje6oVA4w3B79jiui8SuRYwxg43y5/AD/wCvW0Z+4ck6H72y6kU2nsst5cKqOZ72Ys6WiTmIKxGHLsFQc56dOSa0xpGnDUpIvscOx75oiNvRWtw5A9PmGRjpzjGTXEoSeT0obSr6RGuFtmMfUcjJHqB1qFLyN507bysXdbVbW40+5twsEstlFM5iG0FznJAHA6DgVv8Ah/U/7R8rzAFmSRQ+OM89a4YcjPbOM1p6LMbbVYMMCJfkOD69B+eKITtIVWknDzR3ybodbjDIyiSRwCRjPysePyrmbKDFpBDdWS6aJL+ECDa3+ljcMhg5LYXrnO3npmovFDgW0EefvOT+Q/8Ar1zBLHaCcheBnnHeqqS1M6FO8L3OvLW01/4mX7RPM/2adnjljGwFD8pB3HO3jHAx7Vx1tK9vIssUhWQchlPSrv8AY17NGs5t28pjvbYBkL6hetUhGEwCCD71DbOiCjZpO56RoN0+o6Q9w9swcMoU7Pvc4JU9xx+HNTNKOdvb9a4fQ5fJv0CnCyAof6friuxVfu8nkV0QfMjz68OSdkadmI5oo2ZAcyFTkc425oaPzCrAIT5KsRs3Ek8ZC9Kz1UYK5po4Bx94dvWqsY3NFoExC/kh3KOD8ig57HbnBI9P8Kp3saG1VpVCneQN8QRjx6DqKhaU8OuNw9QCPxBqG4nLsXmyWPU4poRZu4k+2adIx/drDHu7jaDQ9s8baoZMGJoJHiU4xjqCPpkdOmaw7mVG/dQli5PXpiqhtfKyS4JPXirUTGdVbIquorop3Vr3RrZoIZI5bSFJN6ZJU5HB6jGSQRjnrnisJ4+faiFT5o+lW9TmjobaaULSKURhXU3DrvFsszIqnADliFXrnp+NP1fS4XjvLawtkNwl0smxF+YRmMZx3xuPQdKyMOO2amhuJoQUXYUznDxq+D7ZBx/+qpNNLWsR69bJbSWCJHGhNnGX2Ywzc5OR1+tZgWreoTy3N0HlbcQgUDGAoHQADgCoFHPNUtjKSTd0UtmaQIPxp/U0mCahaI6ZyUpaCqMj3qeK3llDeXGz7VLNtUnAHUn2rQ0u1tm0rUbmeDzZIPK2DeVHLEHOOo/yCOtbOn2tvHbSXqRlI7nT598Kt0KlQdpOTz75x71PMbumjmFjJOMVoJazpbxzFdsTsQpyPmx1wOv41ftNPj1K1guLeARSNP5Dxq52sMbtwLZI4+vT8KvfZoLm1luCAywvGkfkNIzBS2Nvz8E4IxjvT5jCVJHP3SAwA45B4NX7OK8tbO4lJVPs5XzIZFIYbuhxjv8AWrF3DbTi8jt4YHMKM4VWlSRAD1O4YOO4/Km+IJHOr3MW9vL3K2zPGdgGcetVzX0IVPl1J4LoTpkOq+oB5q3HHLMn7mNmUcEgcVFFAH8PrF5CbjPgAbvvbevXr+ntU2kyul9DbMuNoIPGMYBqH5HRG/UhkJTggj3qGSRMjB4FI12gbbk5IqIrHKflBH06UXHYZNBHcgeciOM5AYZxTrSz06SOVYooDIjYkAQcVU1Wb7DaFkkHnP8ALGCPzP4VzVrdT2W1428uRc5YHO7JzzWNSokzsoUJTi3ex3G7ACHoOAPQVxWqY/tO52jjzD09e9W28R3csb4ii3qMlwfw6fjWQ0juxYsSSck+prGpNPRHRh6MoNuRbsFb7Qu04O5f516LLbR3GBNDHIF6BlzivPdHV5tVt0UnG8M30HP9K6rXNZksLTZHIRPLwvsO5qqekW2TiLynGMTQtrbS7lpFjgt2MbbXGwcGny8St6Zrz+DUbqylWa2uCsnfj9Dkc1oS+KLuRGURxq5439/riqjUVtTOph5t6Mzr8Kuo3SoMKJWwPxptmT9vtvXzUx+YqBnyvT5skls9f881e0WD7TqsA7I3mH6Dn+eKxWsjrekGdnNbQXG3zoI5NvTcucZqpb2+l3W/ybeBtjbGwg4NQa9qf2K1EUbYmlGB/sjua5m0uLmwui8T7XUlSOCDjsfWtpTSdrHHSoylC97HoSgxgYPJNcPqKos10q/cWRtuPrxV+bxFdNF8iRqxH31zx+FYV1ODEqrwccnJ55zn/PpUVJqVrG+Hoyp3bJ9MmY31mpJIWRVX2G7P9TXbmUYxnpXD6FCZ9RjOOIgXP4dP1IrtEtt8QZmxnpj0rWjs2c2M+NJE6sZOV5x1ofevzbc/SmwusSeXnP4UyW68psLg59a2ORtIVmVhvVsHvms+e9fOEK49RzT5FSdtxGCfSoGtgTw4B9xVpGMpvZBaqWMkhOW6ZqCbhiKniVodwboe9V5TufAoZmkR9RToR+9AowAuO9IG2nI60XDlLGHHHpS4Y84FVzNJj71IZpf736Ui/kMul/ffgKiCU93Z2yxyaQgk5NO5FimVFKoApSMjOaQAk1CWh1NrmVkTJI6RvGsjKkmN6hsBsdMjvUiXdwqeWJ5RGFZQoc4weox6HvVYA04UrIqU2Wre5lRQiyuqh94UMQA3r9ferrXVzMrLJcSOGADBnJyByKy4+tXVbiqRhNtl+8vZ76FYpJXWJRjy1diG5zkkkk/j0xTkuLnYQ93cOCMENKxB/DNUd1PViRwec9KLoSTZbW7lgz5UrpnrtYjNJDfTQqypLIgJzhWIqoAzngZqZUEfJOW/lSKT1FEW5t7nJ7LUkuYk3JgY6gUzzcYPpTZGd4iQvFBrczdXge6hSSP5pY+3qP8AGueMzN8uM/WusUMeozUc2n2t2cTRspJHzqcH8fWuepS5ndHXh8VyLlnscv8AKq53DPpSNJIqD5flkPBx1x6V0n/CM2wP+vl+mBVqz0qysX8yKMmTs7nJH09KyVKV9TqliqaWmo3QLBrSHzpk2XEi7SM9B1/A9PyHvRr+mveRrcw5aWMYZR/Evt71oq46jpTxIcmujlVuU4Pay5+c4DIOSOlJnGfrXa3Oj2d8zO6FXP8AGhwT9fWqf/CK22R/pMuPTArF0pdDsWKhbU5hck4UEk8YHeuv0HTTYQmWZcTyjkf3R6VZtNJs7D54YyZP+ejnJ/8ArVMX4981pCny6swrYjnXLHYx/EVg88X2iD5mXG9MdQM4I+mT/kVy8blCvIwwzgHP513u/I5rPudHsrxyzxlJDyWjOCamdNvVFUMQoLlkc6rFlxnim/Zw7AbWJJwAvOa6FPDluDn7TKfwFadraWtgoMSfMf42OSf8KiNGT3Np4uCV1qQ6NpEWl2paUZnlwWUnoPT/AD/SrrylRwAFNQsxZuDnsBUXzOSFGT6V1xikrI8mpOU5OTHGfDknuKPL807myFHb1oWLBy/JHanGQgVRCQskQVDtGCKqNIWGatPI0inaM1SCkjFK5fKKXOKj2jk04jik6HkUXFykT9aaTTn5NMpi5ROO1IeTmloNFw5dBmKUDmlP60oouCgUBTwOakC0bcUFc1hgFLinbcGlAoFJtjQMGrMeSKhPIx2FSxHFIRY8v3pQm05NIGAFOHPvQUl3JA2PpQz7vu9ajwx4PSphtVcAUirCogAy9OmmXbtHSmL+8PXAFMcKJMg8CgLiLwKerE1H1p4oGldEysSMHtQ54NQ7sMCKkT52z2pNAn0FXOOT+HpT1c55pjddoH1NNYnIx36Uii2rgdO9P8ziqgPNSZOKZFyVpMio2YDGKaTxUMhwM0MaHk8g0gJ3g0ik49xzj1pxA25FIonQ570EFifm/SoBJgYqTfgdaaE1cQp6nin52jA4qPzDngE0jbifQU0yXAc0nbqaRFH3n/KnoFRcd/Woyd7YHA9aVx8hKZkSPavFUwevuafME3KAx9zUZ5JNCdy7WFLE1G+Qc04nHJpjEscCmTYiPNJtz0p2DR0oDlGEcUEVIcGm4pXKURlKBTsUopXK5bFbFHWgHGadjjNVcxcdRuMUUp680bgO9LmRapNi4FKMc+tNBB71Iq/NTvcl02t0SRt6ipRIc1DjilGRRcSTZKW5oBGeeaYR0NKOtK5XKyTcfwpOaUCnYouLlaGZNOAPU04LnmlIpMpaDMZNODFDwaXbj60mOaYraigknBPFPblqYOvFOXrSK5bIeKd2pg6U/PFFxWGk8U0jIpc0nfFFw5WJkYB7igsSMZxSEYo70XQWbIyD2pyMQDmlIpMUjREgcmjcT2qM5HSmk5pXKtckLeppjOcYFJjj3oNK5SgM5pd3tQetGKdxct9hpJPWmHNSkUlLmGqTI+aNpzzTuPxpO9JzNYUL7hxQQKXgUmaXMX7G2w00CnDmlwKOYTpMzvOVj8pqQSgryOtZ0RAkztxWgvzL7UKbYTw8Y2uPB4qKT5+BUgGRwaQbM9cEUN3CK5dUhsSluvSrC/KcVWmuFj+71NQxXTMfm45pc6WhXsJ1Fc1VHHSnBc1UjnYn72aspMCORirU0zmnh5RJdtAWnJhhkU8LVGOwwDjpTxTttMOB3pbFJOWg49KOlRs1ABJHpRzFKi+pKKQihVIp2Md6aM5xs7IYRgUuKdxjrSZB6Ghjjdh0pwHy0mOaeOlSaKyIjS96VhRigpK41hTRTyKZii4covak6mnY9KAuDRcSihvSk21JtzSEUrmkYojNJzUm31ppIqTSysNopwFNYihsIwsN70hpSeaaQaVzTlENIenFOAz3pdvFSWtCuzc0BxTpUqAgipuaRsyfzMc0hlCrljgVXZ9o5qtLIX69KHIuNO5DJJGitJn6VDDqfXd2rGurmRlWMA89TUaBuCDzSu0aOCmrHTfag2GjOQR+RpT5gTJxWDC7oeDg1pRXDEgtk4NPnF7C2w8h94Lc44q1DGSdx4qZUWRARUyQg1PKN1ElYaEw2QanVWAyRRFDhsGrfljArSKZyzqR2ZDFuB46irQJzzTFQL0qTB/GrVznqWlsDNgcdaibL8VL5fzEmnKoz0pvUUUoorqpHNTKtSbPypD0JoSsKUrjGcqOOtRu/wAvvUchJOc81G0hxkCpcjSNJWIpHdXDKSPap0ViN+cZ6VBnIJPWnKxAHzdOgqbmzhoTJcMGKt2q0km4deDWdkjJ9alBwuc8U1IiVJMu9T60tV0l2jJPFTq27gdatMxlTaFBph68U/FNJVeSadyFEAc0ZzTSy+tODA0XG4WEzin9eKYcdqjLEHJNS2VGLY8kk1Ht5NIz56daC2OaVzZRsL2prUbwaGcYxSuOzI2b061EzmnMSTgVGc9ahysapChyKkDt61Au5j0wKsrGTWbqWCVkRsciom5qyy4qEjnnpUc4RaKzoW59KjdQB0q0cZGBUL/McCjmNotnLW8guztxj0NX49OIIyKbbWRt3ztxzW3B+9Tb3rRa7m03yLQzRZDOAKsx2Qx05rSW3C8EVOkIAGBVchjKvoVIYGjxxxVkJzU4TFBhycirSsc0qnM9Ro5xjrUik42mnpAWOMEVchs0UAtyatXMZWRWEYzgA1MsLf3T+VXQgXpT91UYybtoZ5jYdVIpCAOtaWRTJI0cYIosCb6mcWprMQuRVlrfriqr7gSCKl6FqzKrA7uelTeUpShk3HNO6D6VNjRsqmAA8HikaHHNWMDqc1EwYydeKVjRNkYTPFNucogA6mrIAUbm6Ux087Bx0oaHGWuuxmM7qwIJzVmK+IAT+L1pJIwGwKelurY45qNbm7cWtUWRKzDJ6UyWUBeDzUigKKawVgDgVbbsYKyZXSVycE8VZD8ZzzUXygZApFRnOFpXsU4qRK0uOc0wMWqdLdF5dsmplCLyAKh1EJJIpgN2U/lSPvxjafyq+Co5LDFOLKxAHfpUuoG2xmquKDyPatX7OGGCBUEtk2Pkzio9oLnVyiF4yKAjdRVlISnXrUvle1ZyqEuokU1j5yasxxZANTCAdPSngBTxUXbM5VLlR4sVC0WQa0GUHtTCmR05ouxRqGeISqkd6haDPWtLy8njpTTb7mqkbqqf/9k=)






